

| URL: | http://netzspannung.org/database/348515/de |
| Last update: | 14.02.2006 |
| Date of print: |
|
Kurzdarstellung
Kurzbeschreibung
Das Projekt beschäftigt sich mit den Themen Robotik, Tanz und Sound.
Interessant finde ich, dass eine Maschine Klang oder Geräusche nicht fühlt, sondern in meinem Fall in einen Automatismus umsetzt. Für mich ist es besonders wichtig, Geräusche zu benutzen, die aus menschlicher Sicht untanzbar sind.
Tänze basieren immer auf einem Raster, einer genauen Vorgabe. Diese Vorgaben sollen verwendet werden, um maschinelle Systeme zu bewegen. Die Steuerung - oder besser gesagt - die Initialzündung, wird durch ein Relay erzeugt, dass anstelle eines Metronoms eingesetzt wird. Ein Metronom, der eigentliche Taktgeber, ertönt aber nur in einem bestimmten Intervall von 30 Sekunden. Die Roboter reagieren somit alle 30 Sekunden auf das Metronom und fangen an sich zu bewegen. Für die Roboter gibt es keine Differenzierung unter den auf sie einwirkenden Geräuschquellen. Somit werden sie auch von den Geräuschen, die die anderen Roboter durch ihre Bewegungen erzeugen, weiter bewegt. Aus der vermeintlich untanzbaren Geräuschkulisse
entsteht somit eine Kettenreaktion, die die Roboter autark in Bewegung hält.
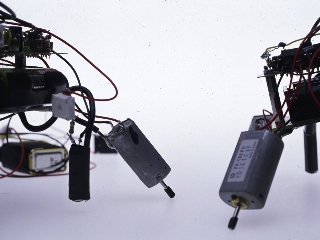
Aufbau:
Die Roboter bewegen sich auf einer Fläche von 127cm auf 127cm. Auf dieser Fläche wird ein Fotopapier ausgelegt, auf dem sich die Roboter bewegen. Jeder Roboter besitzt zwei LEDs, die senkrecht nach unten leuchten und bei Bewegungen der Roboter das Fotopapier belichten.
KünstlerInnen / AutorInnen
- Martin Hesselmeier, -, KHM Kunsthochschule für Medien Köln
Entstehung
Deutschland, 2005-2006
Eingabe des Beitrags
martin@plusfournine.de, 14.02.2006
Kategorie
- künstlerische Arbeit
Schlagworte
- Themen:
- Design |
- Medienkunst |
- Tanz |
- Robotik
- Formate:
- 2D |
- Installation
Ergänzungen zur Schlagwortliste
- LED |
- Fotografie |
- Microcontroller
Inhalt
Inhaltliche Beschreibung
Das Projekt beschäftigt sich mit den Themen Robotik, Tanz und Sound.
Interessant finde ich, dass eine Maschine Klang oder Geräusche nicht fühlt, sondern in meinem Fall in einen Automatismus umsetzt. Für mich ist es besonders wichtig, Geräusche zu benutzen, die aus menschlicher Sicht untanzbar sind.
Tänze basieren immer auf einem Raster, einer genauen Vorgabe. Diese Vorgaben sollen verwendet werden, um maschinelle Systeme zu bewegen. Die Steuerung -oder besser gesagt- die Initialzündung, wird durch ein Relay erzeugt, dass anstelle eines Metronoms eingesetzt wird. Ein Metronom, der eigentliche Taktgeber, ertönt aber nur in einem bestimmten Intervall von 30 Sekunden. Die Roboter reagieren somit alle 30 Sekunden auf das Metronom und fangen an sich zu bewegen. Für die Roboter gibt es keine Differenzierung unter den auf sie einwirkenden
Geräuschquellen. Somit werden sie auch von den Geräuschen, die die anderen Roboter durch ihre Bewegungen erzeugen, weiter bewegt. Aus der vermeintlich untanzbaren Geräuschkulisse entsteht somit eine Kettenreaktion, die die Roboter autark in Bewegung hält.
Technik
Technische Beschreibung
- Platinenlayout Eagle
- Bascom AVR Microcontroller Programmierung in Basic
- Stromversorgung: 6V - 9V
Hardware / Software
- ATMega AVR-RISC-Controller
Kontext
Hochschule / Fachbereich
KHM Kunsthochschule der Medien Köln
Mediengestaltung
URL der Hochschule
» http://www.khm.de
Betreuer des Projekts
Frans Vogelaar
Kommentar des Betreuers
Small robots that perform dancing patterns react to sound, and thus to each other(s noises). The documentation of this performance and thus its �materialization� was done in an instalative process. This �materialization�, was based on the technique of photograms, actualizing this old tradition.
Seminar / Kurzbeschreibung
Within the �route� seminar time-based spatial notations were investigated and developed. Traditional techniques as well as contemporary instruments were examined. The topologies of the route-networks were researched. Strategies for developing the networks and for building of nodes were designed.
Zuordnung Forschungsbereich
The field of �Hybrid Space� focuses on the combinations of analog and digital space. The in-formation of materials and the materialization of information are central research themes within this field.
|
|
| » http://www.khm.de/mg…action=details&id=245 |
|
|